Mars Desert Research Station
Mission Summary
Crew 325 – Aether
Dec 15th, 2025 – Dec 27th, 2025
Crew Members:
Commander and Crew Astronomer: Dr. Cesare Guariniello
Crew Scientist: Ellenah del Rio
Crew Engineer: Morgan McCoy
Health and Safety Officer: Isabella Levine
Green Hab Officer: Adrianna Waterford
Crew Journalist: Saranya Ravva

Acknowledgements:
The entire Crew of MDRS 325 would like to express their gratitude to the many people who made this mission possible: our deepest thanks to Dr. Robert Zubrin, President of the Mars Society; Ben Stanley, On-Site Manager, and Sergii Yakimov, MDRS Director, who assisted us in-situ and helped us troubleshooting the little problems we encountered; Dr. Shannon Rupert, Director Emeritus, whose past advices still supports our crews; James Burk, Executive Director; Peter Detterline, Director of Observatories, who trained and assisted our Crew Astronomer before and during the mission; Michael Stoltz, The Mars Society Liaison, Media and Public Relations; Scott Davis, EVA Suits Support, Russ Nelson, Disaster and Emergency Management, and Ben Greaves, Greenhab coordinator; Purdue faculty, departments, and organizations who helped us throughout the year; external sponsors, family, and friends who supported this mission; and all the unnamed people who work behind the scene to make this effort possible, and who gave us a chance to be an active part of the effort towards human exploration of Mars.
Mission description and outcome:
MDRS 325 “Aether”, twin of mission 326 “Gaia”, is the tenth all-Purdue crew at MDRS. The mission was characterized by very high research quality, great weather, good mood, and an overall smooth and pleasant time for the crew members. The diverse crew, including four women and two men, representing five countries and various departments at Purdue, is comprised of undergraduate students, Master’s students, PhD candidates, and professional staff, accurately represented Purdue’s honored tradition in the field of space exploration.
Crew 325 developed and implemented multiple research projects, with particular emphasis on infrastructural and operational needs of Martian settlements, and on physiological and biological factors. In addition, the crew conducted research projects in horticulture and geology, as well as astronomical observations. Various projects required Extra-Vehicular Activities (EVA), which covered all areas of MDRS and in the amount and quality of samples and scientific data collected. Furthermore, the crew was the subject of psychological research on the dynamics and behavior of individuals in isolation in harsh environments.
The crew is planning to continue working on the data collected during this mission, to support the twin mission “Gaia” and to participate in various outreach events, in order to spread awareness about MDRS missions and to foster awareness and passion for space exploration.

Figure 1. MDRS 325 Crew posing in the lower deck of MDRS habitat. Left to right: Crew Engineer Morgan McCoy, Commander Cesare Guariniello, Crew Journalist Saranya Ravva, Health and Safety Officer Isabella Levine, Crew Scientist Ellenah Del Rio, and Greenhab Officer Adrianna Waterford.
As commander, I am personally very proud of this crew, which trained together for a long time between the time of selection and the period of the mission and was capable to keep a high level of fidelity and realism (including only two short communication windows per day, strict safety and simulation protocols, and hard work), and to successfully mix professional research and light-hearted moments of life in common in a shared environment. At Purdue, these applicants passed a rigorous three-phase internal selection process, followed by training on all the MDRS procedures and operations, research implementation, fundraising, and team-bonding activities. During the mission, the crew properly followed safety and research protocols, performed as a tight group, and learned about themselves and their skills and limitations as analog astronauts and aspiring astronauts. The pace kept throughout the mission was a combination of long, fruitful, and professionally conducted EVAs, work in the laboratory, in the RAM, and in the Greenhab and slower-tempo personal and communal time in the habitat.
Summary of Extra Vehicular Activities (EVA)
After being trained in the use of rovers and in the safety protocols for EVA, the crew had ten excursions during rotation 325, two of which being the traditional short EVAs to Marble Ritual. The remaining EVAs were medium to long excursion, where the crew greatly maximized time usage, especially the time spent walking and performing field activities, which was in average 85% of the total EVA time. The EVAs reached areas in the Mancos Shale (Skyline Rim), Morrison Formation (Kissing Camel Ridge and Barainca Butte), Dakota Sandstone (Candor Chasma), and looked into the Somerville Formation (Somerville Overlook). The EVAs served multiple research projects that focused on operations and infrastructure, as well as providing opportunity for geological sample collection and gathering of Garmin data on performance during EVAs.
Table 1. Summary of EVA, indicating Sol of execution, total duration and distance covered, time and distance spent walking and performing activities, and time percentage spent in activities outside driving.
|
EVA |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Total |
|
Sol |
1 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
Walking and activity time (h:mm) |
1:14 |
0:58 |
1:25 |
2:58 |
3:11 |
2:56 |
2:16 |
3:06 |
2:41 |
1:29 |
2:57 |
1:25 |
26:38 |
|
Total time (h:mm) |
1:19 |
1:04 |
1:42 |
3:43 |
3:50 |
3:30 |
2:46 |
3:44 |
2:41 |
2:10 |
3:32 |
1:25 |
31:26 |
|
Walking distance (km [miles]) |
1.0
[0.6] |
1.2
[0.7] |
1.1
[0.7] |
4.9
[3.0] |
2.4
[1.5] |
5.2 [3.2] |
2.8 [1.7] |
3.9 [2.4] |
8.0 [5.0] |
2.5 [1.6] |
8.7
[5.4] |
3.6
[2.2] |
45.3 [28.2] |
|
Total distance
(km [miles]) |
2.1 [1.3] |
2.2 [1.4] |
4.3
[2.7] |
12.9
[8.0] |
11.3 [7.0] |
13.2 [8.2] |
11.8 [7.3] |
16.9 [10.5] |
8.0 [5.0] |
14.4 [8.9] |
16.9 [10.5] |
3.6
[2.2] |
117.6 [73.1] |
|
% not driving time |
94% |
91% |
83% |
80% |
83% |
84% |
82% |
83% |
100% |
68% |
83% |
100% |
85% |
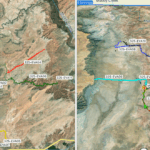
Figure 2. Satellite 2D (left) and 3D (right) maps of the EVAs performed by MDRS 325 crew.
Summary of GreenHab Activities
Crew GreenHab Officer: Adrianna Waterford
The GreenHab operated well and was well-maintained throughout the mission, providing fresh produce, herbs, and a valuable space for crew wellbeing. Lettuce, basil, dill, and a variety of other herbs grew successfully and are well-established for the following crew. Microgreen beds were planted specifically for Crew 326 to ensure continued harvest availability early in their rotation.
The sunflower plants experienced an unexpected stress event around Sol 5 and appeared to be dying back; however, by Sol 9, four new buds emerged from the main stems and developed into new flowers. This regrowth highlighted the resilience of certain crops even after visible failure and provided useful insight into plant recovery in a controlled, resource-limited environment.
In addition to soil-based cultivation, a small hydroponic system was set up to grow microgreens. The system performed better than expected in terms of water efficiency, using significantly less water than anticipated. However, power consumption was higher than is practical for a Mars analog environment, making the current configuration unsuitable for long-term use. A proposed next phase of this experiment would involve integrating an automated power switch for the pump and grow lights, powered by a dedicated solar panel, to reduce overall energy demand and better simulate sustainable off-world agriculture.
Overall, the GreenHab provided consistent fresh food, supported future crews, and served as a calming and restorative space for the crew during the mission.
Research Projects:
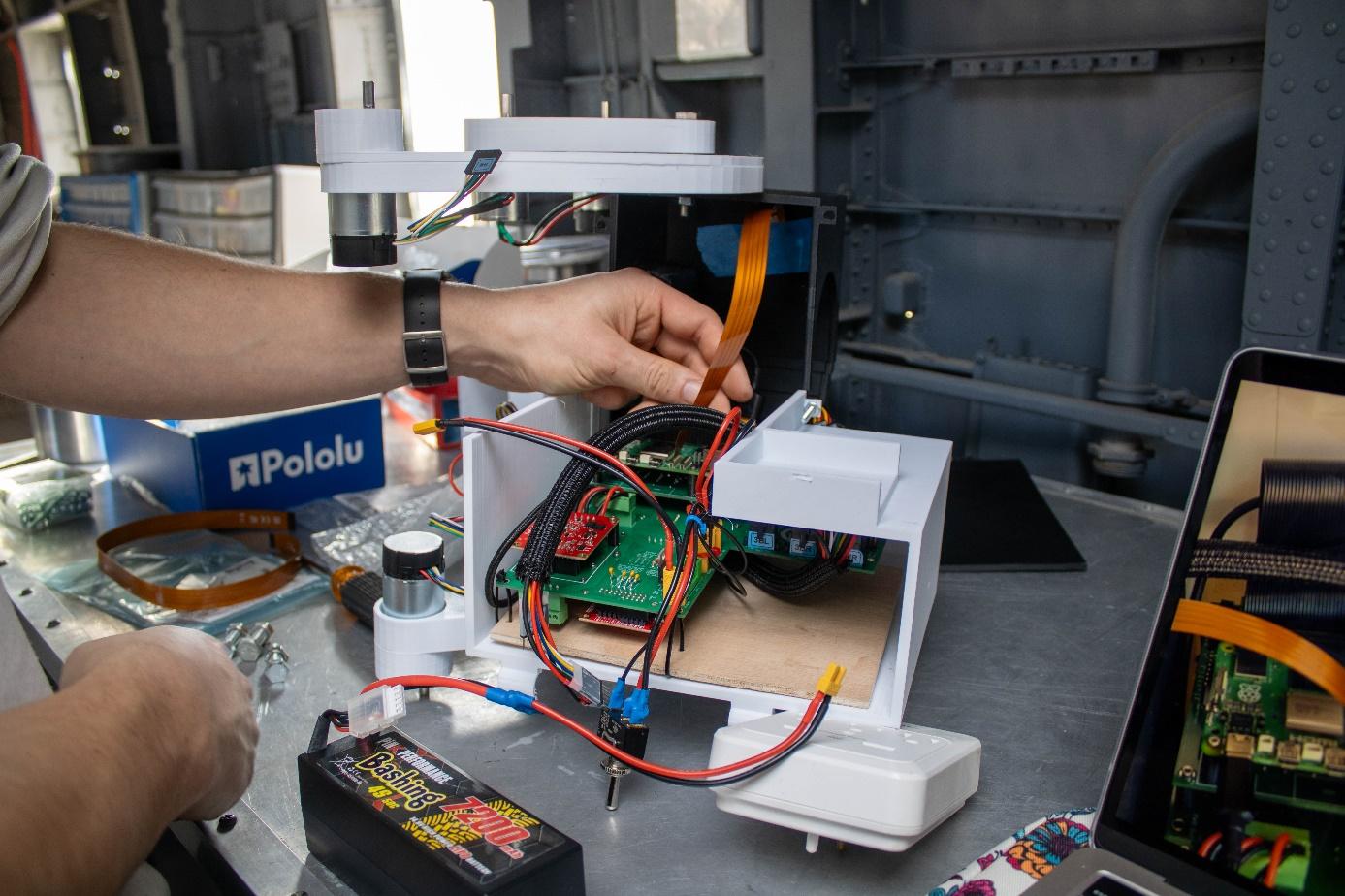
Title: Photovoltaic Measurements and Dust Removal Techniques for Sustained Martian Power Generation
Author: Ellenah del Rio
Description, activities, and results: This project evaluated how terrain elevation and panel angle influence photovoltaic (PV) output in a Mars-analogue field environment, while also assessing practical, low-resource dust/handling mitigation approaches for keeping power generation reliable during EVAs. The system was designed around an Arduino-based logger to collect repeatable voltage-proxy measurements from two fixed panel orientations (25° and 45°) along with a light reference channel, enabling offline operation during limited connectivity and constrained mission resources.
During the mission, the experiment required iterative hardware and software refinement to function reliably in the field. Early runs were limited by intermittent disconnections, inconsistent logging completion, and SD initialisation failures that were addressed through improved offline workflow, reformatting/partitioning to a FAT32-compatible configuration, and repeated validation runs until 30/30 logs could be captured in one EVA session. Field deployment also highlighted mechanical vulnerabilities (panel mounting failure and loose wiring), reinforcing that sustained PV research on Mars depends as much on ruggedisation and repeatability as it does on raw sensor accuracy.
The dataset collected across multiple sites and elevations (including Kissing Camel Ridge and additional runs up to ~1405 m) shows a strong location/elevation dependence in measured output, with notable run-to-run variation even at the same fixed angles. A key operational finding was that higher-elevation trials produced markedly different behaviour than lower-elevation trials, and the experiment notes suggest that maximum output may occur at a flatter angle (≈25°) than the two angles tested in these logged datasets. This supports the need for a broader angle sweep and time-of-day coverage: single snapshots can be misleading because solar incidence changes continuously, and the “best” fixed angle likely shifts throughout the sol.
Dust removal and sustained operation considerations emerged primarily from field handling and durability constraints rather than from a dedicated cleaning apparatus. The mission experience indicates that the most immediate threats to sustained power were: (1) mechanical instability (panel detaching/breaking), (2) connection integrity (a wire detaching but temporarily working when physically held in place), and (3) transport/housing limitations during steep EVA traverses. These issues directly inform practical dust-mitigation strategy selection: any cleaning method that adds complexity, mass, or fragile components risks reducing overall reliability. For this mission configuration, the most defensible approach is a simple, low-failure cleaning protocol (gentle brushing/wiping paired with improved enclosure and strain relief) plus operational controls (protective stowage during movement, minimising exposed adhesive surfaces, and standardising setup steps to prevent accidental contamination or damage).
The results and lessons learned indicate that a mission-ready PV optimisation workflow should prioritise (1) an all-day logging schedule to capture sun-angle effects, (2) testing ≥5 panel angles (including the flatter range suggested by field observations), and (3) a more robust reference strategy for illumination (e.g., maintaining one sensor in a controlled-light position to better interpret changes in the exposed sensor, as suggested in mission notes). Collectively, these improvements would convert the current proof-of-concept into a repeatable field protocol capable of supporting long-duration analogue operations—and, by extension, informing sustained Martian power generation strategies where dust, logistics, and ruggedisation dominate real-world performance.

Title: Assessing the Establishment of Telecommunications Hardware under Environmental Requirements (AETHER)
Author(s): Morgan McCoy
Description, activities, and results: Three trenches, each 5 meters long and with a minimum depth of 15 cm deep were dug, timed, and filled. Two trenches were dug in loose dirt, and it took 8.5 minutes to dig when unfatigued and 12.5 minutes while fatigued from a hike. In hard, rocky soil, it took 32 minutes to dig when unfatigued. When installing the prefabricated cables, it took just over 2 minutes to install and test, regardless of fatigue level. In the habitat, the prefabricated wire took 17.5 minutes and 13 minutes to create. In the field, It took 46 minutes and 20.5 minutes when fatigued and 36.75 minutes and 20 minutes when unfatigued. In all cases, the first terminal took the longest to create and all subsequent terminals were created faster. In field-testing, this is attributed to insufficient free wire length to effectively manipulate with gloves, necessitating additional removal of the outer insulation. These results demonstrate that it is possible to create telecommunication lines during extravehicular activities. With training and practice, such tasks can be performed efficiently in a sufficient time.

Figure 5. Crew Engineer Morgan McCoy (left) splices an ethernet cable to RJ45 connectors, after having dug a 5m-long, 15cm-deep trench with the help of Commander Cesare Guariniello (right). Will astronauts on Mars be able to manually setup or repair a communication infrastructure when necessary, and how can we address the difficulties of such operations?
Title: Non-Contact Thermal Imaging for Structural Health of Martian Habitats
Author(s): Saranya Ravva
Description, activities, and results: Description, activities, and results: This project explored the feasibility of using non-contact thermal imaging as a rapid, nondestructive method for assessing the structural health of Martian habitats. Thermal surveys were conducted on the MDRS habitat using 2 different handheld FLIR thermal cameras to image both exterior and interior walls under ambient environmental conditions and do a comaprative analysis on the thermal camera specifications. The objective was to identify temperature anomalies associated with structural discontinuities, material interfaces, or potential insulation defects. Thermal images were collected systematically across selected sections of the habitat, with attention to maintaining consistent imaging distance, viewing angles, and measurement parameters. Visual inspection photographs were taken alongside thermal data to support interpretation. The thermal imagery revealed localized temperature variations along seams, joints, and surface irregularities that were not readily apparent in visible-light images alone. In several locations, linear thermal contrasts aligned with visible cracks or material transitions, indicating potential pathways for heat loss or structural weakness. These observations demonstrate the potential of thermal imaging as a rapid screening tool for habitat health monitoring in planetary analog environments. The study establishes a baseline workflow for non-contact structural assessment that can be expanded with repeat measurements, environmental corrections, and long-term monitoring, supporting safer and more sustainable extraterrestrial habitat operations.

Figure 6. Left: Thermal image of the MDRS habitat; Right: Thermal image showing structural discontinuities on the habitat.
Title: Simulated Microgravity Germination: A Proof-of-Concept for Bioregenerative Life Support Systems (BLSS)
Author(s): Saranya Ravva
Description, activities, and results: This project investigated the effects of simulated “microgravity” on seed germination and early plant development as a proof-of-concept for bioregenerative life support systems in future planetary habitats. Petri dishes were prepared with agar-agar growth media and cress seeds, which were then subjected to two conditions: standard vertical gravity (control) and simulated reduced gravity using a Random Positioning Machine (RPM). The RPM continuously reoriented the samples to randomize the gravity vector, mimicking aspects of a reduced-gravity environment. Seed germination was monitored daily through visual inspection and photographic documentation. Control samples exhibited expected gravitropic behavior, with roots consistently growing downward and shoots upward. In contrast, seeds grown under simulated reduced gravity showed altered growth patterns, including curved, misaligned, or less directionally consistent root and shoot development. While germination rates were comparable between conditions, the morphology and orientation of growth differed noticeably. These results demonstrate that even short-duration simulated reduced gravity can influence early plant development, highlighting the importance of understanding plant behavior in non-Earth gravity environments. The experiment serves as a foundational step toward designing robust plant-based life support systems for long-duration space missions and provides a protocol that can be extended by future MDRS crews.

Figure 7. Left: Crew Journalist Saranya Ravva prepares Petri dishes with seeds. Center: seeds that grew with regular vertical gravity (pointing down). Right: seeds that grew in simulated reduced gravity.
Title: Aerospace Evaluation of Training, Health, and Environmental Readiness (AETHER)
Author(s): Adrianna Waterford

Figure 8. Sample data of 4 metrics collected during the analog mission
Description, activities, and results: AETHER generated a comprehensive, mission-length dataset integrating cardiovascular, autonomic, respiratory, sleep, activity, thermal, and subjective measures to characterize daily crew state in an isolated, confined environment. Metrics collected included heart rate, beat-to-beat intervals, heart rate variability (summary and raw), respiration during wake and sleep, sleep stages, nocturnal oxygen saturation, actigraphy, step counts, activity epochs, and daily activity summaries, alongside skin and device temperature and structured daily self-reports.
The value of this dataset lies in its suitability for machine-learning analysis of interacting physiological systems rather than isolated metrics. The combination of high-resolution time-series data with daily summaries enables modeling of workload transitions, fatigue accumulation, recovery efficiency, circadian disruption, and behavioral adaptation across the mission timeline. These data support approaches such as multivariate trend analysis, anomaly detection, clustering of physiological states, and short-term forecasting of readiness.
The primary objective moving forward is to develop AETHER into a software platform capable of autonomously ingesting wearable and questionnaire data and producing daily, interpretable reports for analog missions. By learning individual baselines and temporal patterns, the system is intended to surface meaningful deviations, cumulative strain, and recovery deficits without requiring manual data review. This approach prioritizes operational usability while preserving analytical depth.
The MDRS dataset serves as an initial training and validation corpus for AETHER. Continued development and beta testing are planned during extended deployments at Rothera Research Station in Antarctica, where longer mission durations will allow refinement of temporal modeling, robustness across environments, and validation of machine-learning outputs for sustained analog operations.
Title: Autonomous Hydroponic Resource Optimization System
Author(s): Adrianna Waterford
Description, activities, and results: This project evaluated the feasibility of a small-scale autonomous hydroponic system for microgreen production in a Mars analog environment, with emphasis on water efficiency, power demand, and operational sustainability. The system was deployed within the GreenHab and configured to support early-stage microgreen growth under continuous crew habitation constraints.
During the mission, the hydroponic system was assembled, operated, and monitored for water usage and power consumption. The system demonstrated high water efficiency, consuming substantially less water than anticipated when compared to soil-based microgreen cultivation. Plant growth was healthy and consistent throughout operation, indicating that hydroponic microgreen production is viable from a biological standpoint in an isolated environment.
However, electrical power demand for the circulation pump and grow lights was observed to be disproportionately high relative to the agricultural output. This level of energy consumption renders the current configuration impractical for long-duration Mars missions, where power availability is tightly constrained.
The results suggest that while hydroponics offers clear advantages in water conservation, energy optimization is the critical limiting factor. A recommended next phase of this work is the development of an autonomous power management architecture, incorporating timed pump and lighting cycles and a dedicated solar power source. Such a system would reduce continuous power draw and more accurately reflect sustainable off-world food production strategies.
Title: Remote sensing for ISRU
Author(s): Cesare Guariniello
Description, activities, and results: This is a continuing project, on the use of remote sensing for the evaluation of geotechnical properties (in particular, water content and bulk size) of material for potential In-Situ Resource Utilization (ISRU) for construction. With the help of the crew, I collected samples of clay rocks at Compass Rock, Somerville Outlook, Barainca Butte, and samples of shales and Skyline Ridge. These samples will be processed once back to Purdue. Outside the project, I also collected basalt samples from the southern region of MDRS, as well as Gryphaea fossils.

Figure 9. Commander Cesare Guariniello working in the field to collect geological samples.
Title: Integrated Assessment of Physiological Stress and Cognitive Performance in Analog Astronauts: Correlating Salivary pH Levels with CO2 Exposure
Author(s): Isabella Levine
Description, activities, and results: This project investigated the relationship between environmental stressors and human physiological and cognitive responses during an analogue astronaut mission at the Mars Desert Research Station. Over a 10-day period, continuous CO2 concentrations were recorded using multiple sensors placed throughout the habitat to capture environmental exposure trends. Salivary pH samples were collected daily from crew members as a non-invasive physiological stress marker, alongside daily behavioural assessments consisting of short, standardized four-question cognitive tests. These datasets are currently being integrated to examine correlations between CO2 exposure, physiological stress, and changes in behaviour under isolated and confined conditions. The analysis aims to better understand how habitat environmental factors influence astronaut health and performance during long-duration missions.
Title: Microbial Burden and Contamination Risk on High-Contact Surfaces in the MDRS Habitat
Author(s): Isabella Levine
Description, activities, and Results: This study assessed microbial contamination on high-contact surfaces within the MDRS habitat, with a focus on contamination risk in shared living and food preparation areas. Surface swabs were collected from the kitchen table and cultured using agar plates at multiple dilution levels (10⁻², 10⁻³, and undiluted controls) to quantify bacterial growth and assess colony density. Results indicated notable microbial presence, highlighting the importance of improved cleaning protocols, aseptic techniques, and routine surface monitoring in confined environments. Based on observed growth patterns and colony morphology, future iterations of this work will prioritize liquid culture methods over dry plating to improve quantification accuracy and reproducibility. This project informs contamination control strategies relevant to analog habitats and long-duration space missions.

Figure 10. Health and Safety Officer Isabella Levine prepares cultures of bacteria in agar-agar. The bacteria are from swabs collected in various locations in the habitat.
Title: Photo astronomy with the MDRS WF and Solar Observatory outreach
Author(s): Cesare Guariniello
Description, activities, and Results: The mission began with two days of servicing the robotic telescope dome at MDRS. Following these operations, the few clear nights during this mission were used to image M31 (Andromeda Galaxy), Horsehead Nebula and Flaming Nebula, Rosette Nebula, and Triangulum Galaxy. The solar observatory was never used due to hazy or cloudy atmosphere during the day, and the dome was only operated once, to check its functionality.

Figure 11. Rosette Nebula, a star-forming region about 5000 lightyears away from Mars. Image from 350 raw captures in red, green, blue, luminosity, and H-alpha with the MDRS-WF telescope.
Communal life at MDRS
Part of the work of analog astronauts is related to experiencing and studying life in isolation in extreme environments, as well as communal life in restricted spaces for extended period of times. Crew 325 spent a relatively short time in these conditions, 12 sols, but practiced activities and techniques that can help with potentially difficult and even dangerous situations that can arise in such conditions. The photos below show part of the experience in an analog mission at MDRS.

Figure 12. Sample of food from Crew 325 – Aether. Pancakes, freshly baked bread, soups, mac&cheese, pizza, baked ziti, panettone.

Figure 13. Moments of relaxed habitat life: writing and reading Christmas cards, exchanging gifts, coloring books, and enjoying cozy movie nights (The Martian, of course).
Mars Desert Research Station Crew 325 – Aether
Ad Astra




























You must be logged in to post a comment.