[category science-report]
Crew 311 Mid-mission Science Report
MDRS, Sunday 03 March 2025
Name of person filing report: Somaya Bennani – bennani.somaya311
Crew 311 has been in the MDRS for two weeks now, conducting experiments while simulating life on Mars. We have done everything we could to make this simulation as accurate and relevant as possible. The current report aims to give the reader an understanding of what has been achieved and what is yet to come.
This report is organized as follows: overview of all the experiments conducted during our mission, as found in the Mission Plan sent on Sol 1, reminded here for clarity, and updated with the experiments’ current status.
Name: LOAC / MegaAres / Field mill / Cosmic watch / Weather station
Type: Atmospheric physics
Crew: Robin (Crew Engineer) & Quentin (Crew Astronomer)
Description:
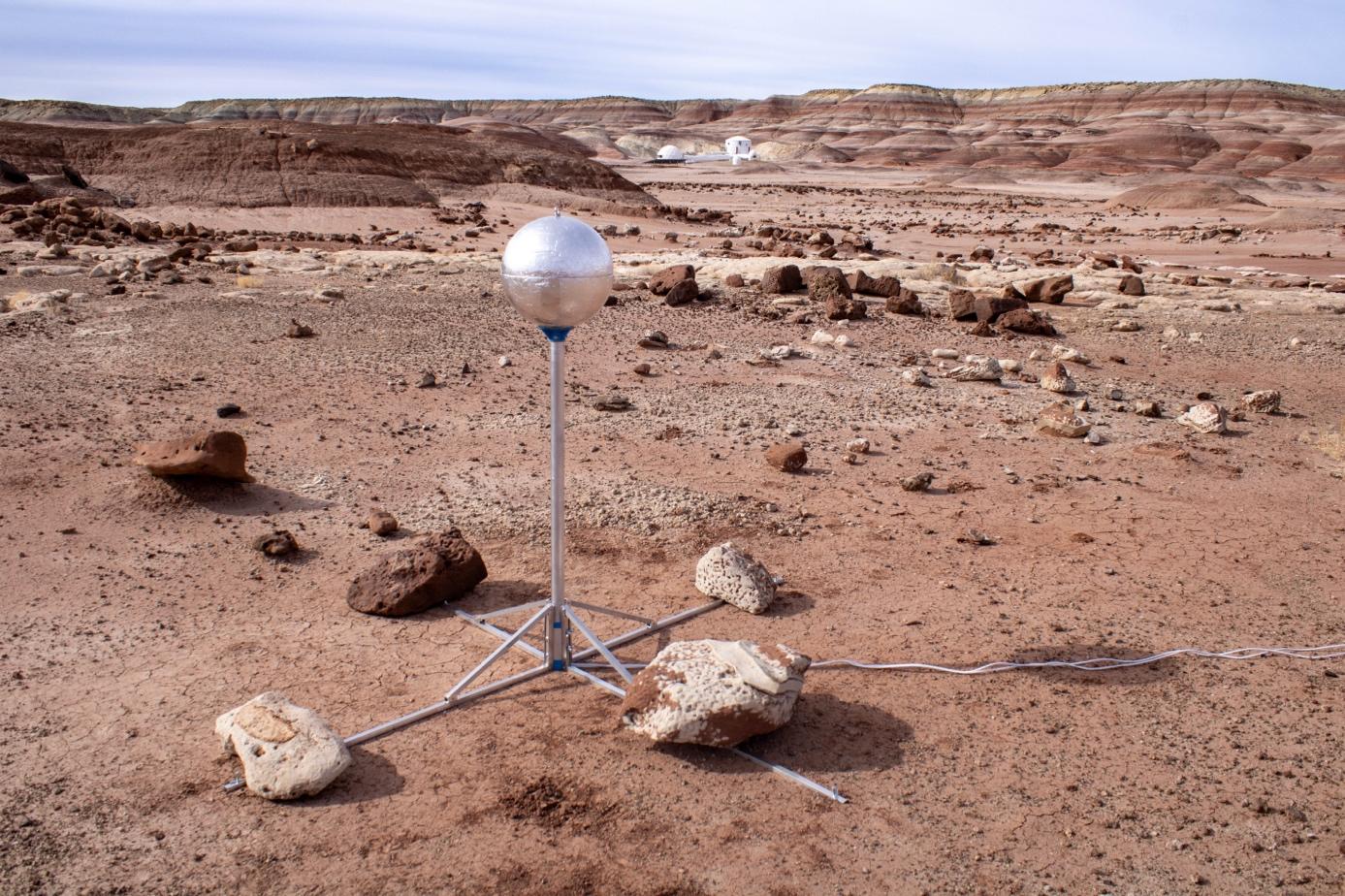
LOAC / MegaAres: These experiments, conducted since 2019, originates from the French National Center of Scientific Research (CNRS). It involves EVA operations and includes two key instruments: LOAC, an optical aerosol counter that measures and classifies airborne particles by size, and Mega-Ares, a sensor that precisely measures the electric field and air conductivity.
Field mill / Cosmic watch / Weather station: The experiment involves several measurement instruments to analyze environmental and space weather conditions. The field mill is used to measure the local electric field, providing insights into atmospheric electrical activity. The cosmic watch consists of two particle detectors that quantify the number of cosmic particles reaching the Earth’s surface. The collected data is analyzed in correlation with solar eruptions and coronal mass ejections (CMEs) to study their impact on Earth’s environment. Additionally, a weather station records precise atmospheric parameters at the observation site, contributing to a comprehensive understanding of local weather conditions.
Related EVAs: #3, 4, 5, 6, 7, 8
Status:
All instruments have been deployed 400m away from the station on sol 3. The batteries have been charged and changed every two to three days and the data collected after each swap. All instruments are healthy and collecting good data.
Name: AMAIA
Type: Technology
Crew: Isolde (Crew Journalist)
Description: The AMAIA system is integrated with station sensors, including environmental sensors and monitoring devices, enabling seamless data exchange. This integration allows AMAIA to estimate stress levels and provide data-driven responses to astronaut queries. Its capabilities support astronauts in their daily tasks by assisting with environmental measurements, voice recognition, and emergency exercises, enhancing both efficiency and safety in the station.
Related EVAs: no EVA
Status: The computer LLM part of this experiment is working perfectly, we are currently using the AI assistant to translate report to English and also to have some recipes for our lyophilised food. The watch part doesn’t work properly, so we are still in discussion with the researchers at CNES and we try our best to debug it in order to find the problem.

Name: Orbital Architecture
Type: Human Factors
Crew: Somaya (Crew Scientist) & Celyan (HSO)
Description: The study aims to quantify stress levels in analog astronauts using chestbands, smartwatches, questionnaires, and position sensors. It investigates the impact of environmental factors such as privacy, temperature, and humidity on stress levels. As part of the Axiom 3 mission, this research has also been launched to the International Space Station for further analysis in a space environment. The cognitive tests are taken in different areas of the base (Science dome, Greenhab, Hab) every time with a frequency of twice per week for every crew member.
Related EVAs: no EVA
Status: The IPS (Internal Position System) have been deployed during the first 4 sols of the mission. Since this day we are collecting daily data from the IPS as well as from the polar band and the polar watch. In addition, we have installed the BIOS light bulbs in both the upper deck and the lower deck during the first week. Everything is going well.

Name: Humanise
Type: Robotics
Crew: Somaya (Crew Scientist)
Description: This research investigates human-machine interaction, stress, and performance by examining cognitive workload during teleoperation between analog astronauts and rovers. The study aims to improve human-robot collaboration for future Martian settlements. Various control methods are tested, including Brain-Computer Interface (BCI) using mental imagery, Virtual Reality (VR), and joystick control. The goal is to develop intuitive and user-friendly remote-control interfaces for operating rovers in Mars- or Moon-like environments.
Related EVAs: no EVA
Status: The first part of this experiment with gamepad is done. All astronauts have monitored the robot using a PS5 controller in the science dome to teleoperate a robot very fat away in the campus of TU Delft, in the Netherlands. The second part will be to do the same experiment but with a VR headset to control the rover.

Name: Time Percept
Type: Human Factors
Crew: Celyan (HSO)
Description: This experiment investigates the impact of living and working conditions in an analogue base on time perception. It includes daily cognitive tests to assess effects on analogue astronauts
Related EVAs: no EVA
Status: Data is collected twice a day (morning and evening) thanks to an app installed in our computers. Everything is going well.
Name: Photogrammetry
Type: Human Factors & Exploration
Crew: Meddi (GreenHab officer) & Robin (Crew Engineer)
Description: Building on measurements from last year, this study involves nine EVAs coordinated with atmospheric physics EVAs. It focuses on testing 3D terrain maps for EVA preparation and exploration, assessing their benefits for checkpoint identification and location during extravehicular activities. The research also compares scenarios with and without prior familiarization with 3D maps to evaluate their impact on navigation and mission efficiency.
Related EVAs: #5, 6, 7
Status: The first sequence of the experiment took place during week 2 of our stay at the MDRS. We successfully mapped a small part of Candor Chasma using our drone. The crew then explored the canyon using 3D and 2D Maps to monitor the differences in performances. Next week we will discover another area of the martian desert.

Name: Neopouss
Type: Botany
Crew: Meddi (GreenHab officer)
Description: This study aims to assess the impact of microgreens on meal taste and enjoyment. A blind taste test is conducted to compare microgreens grown in soil, glucose tablets, and agar-agar. Additionally, the research evaluates how the presence of a greenhouse in a Martian base influences crew well-being, providing insights into the psychological and nutritional benefits of fresh food in isolated environments.
Related EVAs: no EVA
Status: The microgreens were planted early in the mission (Sol 3), they went through a 5 day phase of germination in the dark and in a humidified environment. We put them under the light during Sol 9 in the GreenHab and in the Science Dome. Everything went according to plan except for the absence of fresh soil in the GreenHab and the fact that the environment is very dry here in the Utah Desert.

Name: TraceLab
Type: Human Factors
Crew: Erin (Crew commander)
Description: This study uses self-administered questionnaires to explore individual and social adaptations to isolated and confined extreme environments. The goal is to examine the social, emotional, occupational, and physical impacts of these conditions, providing insights into human resilience and well-being in space-like settings.
Related EVAs: no EVA
Status: The crew is filling daily questionnaire about individual and social adaptations. As well, weekly questionnaires about team dynamics are filled out.
Name: Core Data
Type: Physiology
Crew: Robin (Crew Engineer)
Description: The Supaero MDRS Crews Initiative aims to collect physiological datasets for human factors research. In addition to physiological data, the study includes water monitoring and environmental measurements. The purpose is to ensure comprehensive data collection while minimizing redundancy, enhancing the reliability and applicability of the research.
Related EVAs: no EVA
Status: The crew is taking daily physiological data (Oxymetry, Systolic and diastolic blood, temperature) as well as other parameters using the Withings smart scale. The crew also fills daily sleep dairy every morning before the sport session. Everyone is wearing a Withings smartwatch to collect data all along the day.
Name: MoovToLearn
Type: Human Factors
Crew: Somaya (Crew Scientist)
Description: This study examines the impact of luminotherapy and relaxation technology on analog astronauts, focusing on factors such as sleep quality. It utilizes Psio glasses to explore their effects while relying solely on Core Data, without conducting cognitive assessments.
Related EVAs: no EVA
Status: Not started yet.
Name: TwinS2
Type: Human Factors
Crew: Isolde (Crew Journalist)
Description: The objective of this study is to test and improve the TwinS2 system by evaluating human performance through non-invasive methods. Voice messages recorded via a microphone provide data for researchers, allowing them to assess and refine their software.
Related EVAs: no EVA
Status: The crew takes daily recording where they share how they felt during the day, as well as a weekly recording of 4 hours every Thursday.
Name: AMI
Type: Technology
Crew: Somaya (Crew Scientist) & Isolde (Crew Journalist)
Description: This study conducts an in-situ test of an anomaly surveillance interface to enhance the simulation. It analyzes crew reactions to unplanned or randomized events that require minor interventions. In some cases, the study may involve up to two "emergency" EVAs near the station. The use of the Engineering Airlock has been requested to support the experiment.
Related EVAs: no EVA
Status: Not started yet.
Name: Exploration – Stratigraphy
Type: Geology
Crew: Quentin (Crew Astronomer) & Meddi (GreenHab Officer)
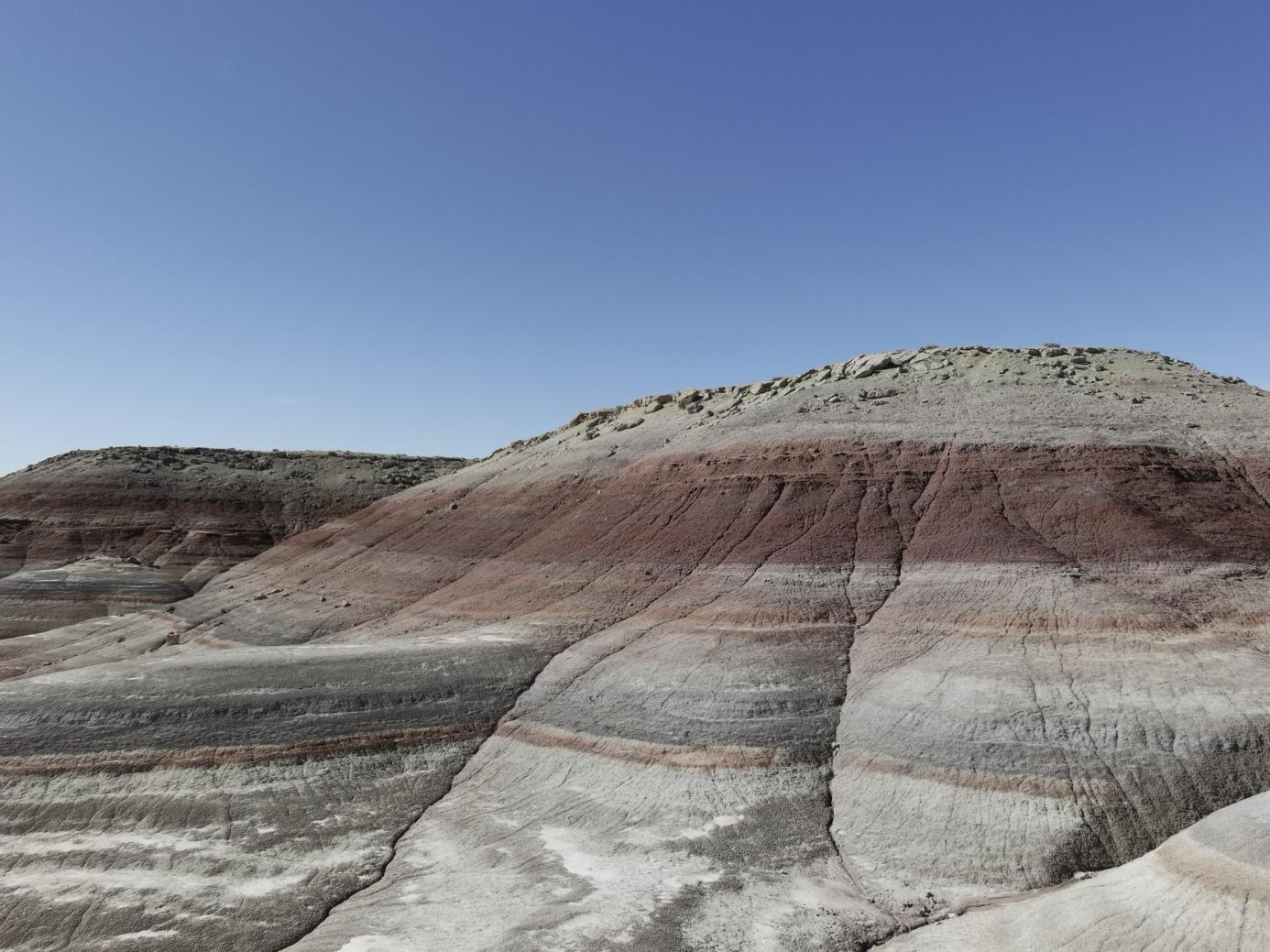
Description: This experiment, conducted by the Research Institute of Astrophysics and Planetology (IRAP), involves EVAs coordinated with photogrammetry EVAs. It focuses on testing stratigraphy through drone imagery, aiming to identify geological samples using these pictures. The study also seeks to train the drone to capture images of entire stratigraphic layers for improved geological analysis.
Related EVAs: #4 and #8
Status: During the two EVAs conducted last week, Crew members took notes of different strates in different areas around the base. They took different aerial pictures using drones as well as a professional camera. They also did different drawing of the geological area.
Name: SupaeroMoon
Type: Robotics
Crew: Somaya (Crew Scientist) & Robin (Crew Engineer)
Description: This project focuses on rovers and technologies designed for the lunar environment, with participation in the European Rover Challenge 2025. It involves testing remote control navigation, evaluating camera and mapping methodologies, and exploring the feasibility of simple autonomous navigation. Additionally, the study tests a robotic arm for probe retrieval and collaborates with high school students on Arduino-based experiments.
Related EVAs:
Status: We printed different parts of the robot using the 3D printer “Bambo Lab A1”. The assembly of the entire rover will be done in the next week.
Name: Public Outreach
Type: Social
Crew: Meddi (GreenHab Officer)
Description: This project aims to teach the scientific method through a hands-on experiment. It involves sprouting cress seeds in highly saline soil to simulate Martian conditions and assess plant growth viability. The experiment requires one EVA for execution.
Related EVAs: Coupled with the preparation of some future EVAs
Status: Microgreens and EVA Preparation, the weekly reports of microgreens activities are being sent to highschoolers from different schools. The students that work with us are very motivated to be in some way part of our MDRS mission. When it comes to EVA Preparation, students will discover what is at stake in EVA Preparation during week 3 and 4 of our stay at the MDRS.
Name: Astronomer’s observation project
Type: Astronomy
Crew: Quentin (Crew astronomer)
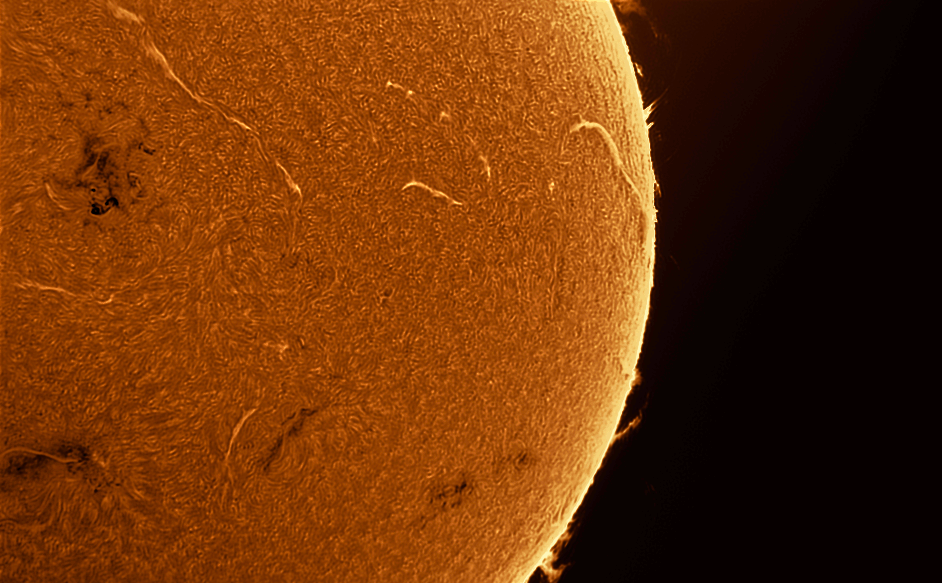
Description: Quentin’s observation project consists of two distinct works: during the first two weeks of the mission, he familiarized himself with the telescope of the Musk Observatory by doing several pictures and animations of the Sun with different parameters. By doing so, he managed to capture high-quality pictures and videos of sunspots and prominences and learned to process them using various softwares.
Status: For the two following weeks, he will use these newly acquired skills to conduct his main project: detecting, taking the coordinates and keeping track of sunspots. He fully developed the code to do so and will test it on his previous observations. The final goal of this work is to find a correlation between the behavior of sunspots and the dynamic of Coronal Mass Ejections (CMEs), which pose a great threat for the future of manned space exploration.






You must be logged in to post a comment.