

GreenHab Report – May 12th
Crew 212 GreenHab Report – 12-May-2019: SOL 7
GreenHab Officer: Hector Palomeque
Environmental control: Ambient with the door open + fan turned up to 3 (max) from 12:00 to 19:00
Shade cloth 80%: on
Average temperatures:
Low: 21 °C
High: 40 °C
Hours of supplemental light: 0
Daily water usage for crops: 7 gallons
Water in Blue Tank: 144 gallons
Time(s) of watering for crops: 12:00
Changes to crops: All plants look healthy. Basil and tomato plants continue blooming. The chard seems to get recovered from the last harvest. Dead leaves/branches were removed from most of the plants.
Narrative: The GreenHab fan had to be turned on because of the indoor temperature has reached +40 °C at 12:00. Plants were watered once at noon.
Sage add some flavor to the Crew’s lunch.
Harvested: Sage 12g
Support/supplies needed: None.
EVA Report – May 12th
Crew 212 EVA Report 12-MAY-2019
EVA #08
Author: Marlen Castillo Vilcahuaman
Purpose of EVA: Locating the martian flora around the Hab.
Start time: 09:12
End time: 09:59
Narrative:
After walking around the Hab many times, it was reported that some interesting flora was growing near the place. The whole purpose of the EVA was to locate this places, for planning better our longer trips in search of the martian flora. Our next EVA had to cover all this points to collect the soil samples. After the walk, we could recognize the diversity around the Hab, and now we can have a better idea for the EVA that has to follow for this project. We were happy that communication was fine between ourselves and the Hab, and no incidents ocurred during the EVA.
Destination: Around the Hab
Coordinates (UTM NAD27 CONUS): Sector12S Northern 4250933, Eastern 518167
EVA Participants: Marlen, Mariona, Paolo, Vittorio
Road(s) and routes per MDRS Map: 1103
Mode of travel: Walking
Sol Summary – May 12th 2019
Hi, CapCom! Thanks for being for us tonight.
Crew 212 Sol 7 Summary Report 12-MAY-2019
Sol: 7
Summary Title: We have a birthday crewmember.
Author’s name: Marlen Castillo Vilcahuaman
Mission Status: A-ok
Sol Activity Summary: An EVA was programmed to explore the plant diversity around the hab. We also had the protagonism of our birthday crewmember. We will be celebrating him with cookies and Nutella. Experiments are advancing and reports are being written. Today has been a calm day.
Look Ahead Plan: EVA for tomorrow, and continue with the experiment.
Anomalies in work: We had a martian mouse. He was cute. We called him El Peanut. We had to free him.
Weather: A shining sun is looking upon us.
Crew Physical Status: We’re all fine.
EVA: 1
Reports to be file: Operations Report, GreenHab Report, Astronomy Report, Journalist Report, Daily Photo Report, EVA Request, Space Suit Report, EVA Report, Commander Report
Support Requested: We’ve got bags of burnable and non-burnable trash in the airlock.
Crew Photos – May 12th 2019
Hello,
These are the pictures for today. Hope you like them!
Best,
Mariona





Astronomy Report – May 12th 2019
Hello from Mars!
Below you’ll find the astronomy report.
—
Astronomy Report
Name: Mariona Badenas
Crew: 212
Date: 12 May 2019
MDRS ROBOTIC OBSERVATORY
Robotic Telescope Requested (choose one): MDRS-WF
** Object Viewed #1: IC5067 (Pelican Nebula)
Problems Encountered: The telescope was open but it did not take pictures of this object (it still has to take 17 exposures). Attached: a color image of IC5067 without including the H-alpha frames, which the telescope still has to take.
** Object Viewed #2: Veil Nebula
Problems Encountered: The telescope took 19 exposures and stopped at twilight. It still has to take 49 exposures for this object.
** (More objects to be Viewed): NGC6992, Iris Nebula, IC1396
Problems Encountered: N/A (Observations of these objects have not begun yet).
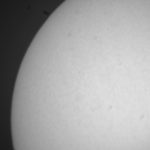
MUSK OBSERVATORY
** Solar Features Observed: Observed the sun through the eyepiece and took several pictures of a sunspot (see attached). I still have not been able to take pictures of interesting phenomena in the solar corona like prominences or granules.
Problems Encountered: I think the camera settings on ICap were not ideal. Will attempt to take new pictures tomorrow.
—-
Thank you,
Mariona

EVA Report – May 11th
EVA #07
Author: Vittorio Netti
Purpose of EVA:
Primary objective
Testing the automatic mission capabilities of the "Palantir" fixes wing drone (Partial Success)
Secondary objectives
Collecting aerial photos of the Martian surface (Success)
Testing the assisting landing capabilities of the drone (Success)
Testing the ground control station during the auto mission mode (Success)
Start time: 17:00 AM
End time: 18:00 AM
Narrative:
The purpose of this EVA was to perform the first automatic mission of "Palantir", our fixed-wing drone. Since the mission required just two members, we were able to bring all the mission equipment in the airlock with us. The equipment was composed by:
– Palantir drone
– Ex Case 1 (pressurized)
– Ground Station Tripod
Spirit departed from the hab with 100% of battery.
We drove along the Cow Dung Road 0110, direction south, on an average speed of 10mph until the marked point (Waypoint 0). Once on the place, we decided to move back on the road of 50m in order to place the ground control antenna in the closest point to the center of the operation area.
We unloaded the rover and proceeded to assemble the ground control station and the drone.
The wind raised to a speed of 8-10mph so we decided to wait some minutes before the launch, performing some aptitude test of the drone main control surfaces. After 12 minutes, around 5:32 pm, we finally decided to proceed to the launch, that has been made with the hand-launch technic. The drone has been driven at the height of 30m in manual mode, and then the auto-mode has been activated by the GCS (Ground Control Station).
The drone started its planned mission smoothly, raising to the altitude of 100m during the first seconds. The entire mission has been followed in real time thanks to the perfect connection between the drone telemetry module and the GCS.
Due to the time lost for the high winds, we decided to interrupt the mission at 70%, in order to return in time to the hab. I’ve taken back the direct control of the drone in order to perform a manual landing. The landing has been achieved through the use of the assisted-piloting feature, that integrates the direct control from the pilot with the flight control unit capabilities.
Once the "Palantir" has been recovered, at 15m from the take-off coordinates, the rover has been loaded again, and the crew left the place at 5:51 pm.
Spirit arrived at the hab with 78% of battery.
The analysis of the photographic material collected during the flight is still on-going, but you can already appreciate the outstanding images that are coming from the flight attached to this message.
The mission can be considered a complete success.
(The route followed by the drone during its flight is highlighted in the EVA analysis map)
Destination: North area of Kissing Camel Ridge E
Coordinates: (UTM NAD27 CONUS): 518231.00 E, 4249778.00 N, Zone 12S
EVA Participants: Vittorio Netti (Commander), Paolo Guardabasso (Medic),
Road(s) and routes per MDRS Map: Cow Dung Road 0110
Mode of travel: driving
Crew Photos – May 11th
Photo of the day: E518659_N4249886_12S_110519_drones_first_flight.jpg


Operations Report – May 11th
Crew 212 Operations Report 11-MAY-2019
SOL: 6
Name of person filing report: Paolo Guardabasso
Non-nominal systems: None
Notes on non-nominal systems: Nothing to report
Generator (hours run last night): 9:30
On (last night): 9:00 PM
Off (this morning): 6:30 AM
Solar— SOC 88% at 7:30 PM
Diesel Reading – 95% [From Director]
Propane Reading – 45%
Ethanol Free Gasoline – 4 gallons
Water (Axillary tank) – 0 gallons
Water (static tank) – 170 gallons
Axillary to Static tank transfer – no
Gallons transferred: No
Water in GreenHab – 150 gallons
Water (loft) – Static to Loft Pump used – Yes
Water Meter: 143500.4
Toilet tank emptied: Yes
Deimos rover used: no (out of order)
Hours:
Beginning charge:
Ending charge:
Currently charging:
Sojourner rover used: ASSIGNED TO DIRECTOR
Hours:
Beginning charge:
Ending charge:
Currently charging:
Spirit rover used: Yes
Hours: 92.8h
Beginning charge: 100%
Ending charge: 79%
Currently charging: Yes
Opportunity rover used: Yes
Hours: 59.1h
Beginning charge:
Ending charge:
Currently charging: Yes
Curiosity rover used: Yes
Hours:
Beginning charge:
Ending charge:
Currently charging: Yes
Notes on rovers: Curiosity and Opportunity were missing one wheel hubcap per rover. It’s not yet clear exactly how they went missing but the Director is dealing with the matter and the one on Curi has already been replaced. A new charging cable was added in order to be able to charge 3 rovers at the same time.
ATV’s Used: (Honda, 300, 350.1, 350.2, 350.3)
Reason for use:
Oil Added?
ATV Fuel Used: Gals
# Hours the ATVs were Used today:
Notes on ATVs:
HabCar used and why, where? Nothing to report
CrewCar used and why, where? Off-Campus
General notes and comments: The crew worked on their experiment and an EVA was delayed and lasted 1 hour instead of 2.
Summary of internet: Nothing to report.
Summary of suits and radios: Some radios didn’t hold their charge, major testing will be carried out in the coming days. Radios proved not working at a range of about 1 km from the Hab during EVA. Some spare batteries for suits were not able to recharge.
Summary of Hab operations: Fixing of the oven door is still ongoing.
Summary of GreenHab operations: The fan was turned on as the temperature passed 40° C and it managed to cool the room to 30°C.
Summary of ScienceDome operations: Microbiological experiments were run.
Summary of RAM operations: Nothing to report.
Summary of any observatory issues: The crew astronomer reported that the telescope is not properly focused.
Summary of health and safety issues: Nothing to report.
Questions, concerns, and requests to Mission Support: Several tourist cars approached the MDRS; the one that passed the sign was stopped by the Director on its way to the Hab.
You must be logged in to post a comment.